 Date: 2016-02-17 12:06:23
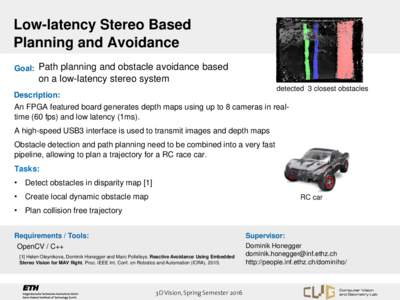
| |  Low-latency Stereo Based Planning and Avoidance Goal: Path planning and obstacle avoidance based on a low-latency stereo system detected 3 closest obstacles Low-latency Stereo Based Planning and Avoidance Goal: Path planning and obstacle avoidance based on a low-latency stereo system detected 3 closest obstacles
Document is deleted from original location.
Use the Download Button below to download from the Web Archive.Download Document from Web Archive File Size: 179,48 KB
|